大勢の女子高生に混ざっての、ホテルの朝食。朝からキンキン声を張り上げるようなことはなく、マナー良く食事を続けていた。
「あの女子高生の中に、座敷童子いたんじゃね?」「いや、座敷童子はもっと小さいはず」
というわけで、座敷童子伝説のある岩手県の遠野から関東に向かって南下を開始。
道中は殆どをクルコンに頼っていた。ハンドルに装備されているクルコン用のレバースイッチを使いながら速度調整を行い、アクセル操作から解放される点は疲労低減に大いに役立っていた。
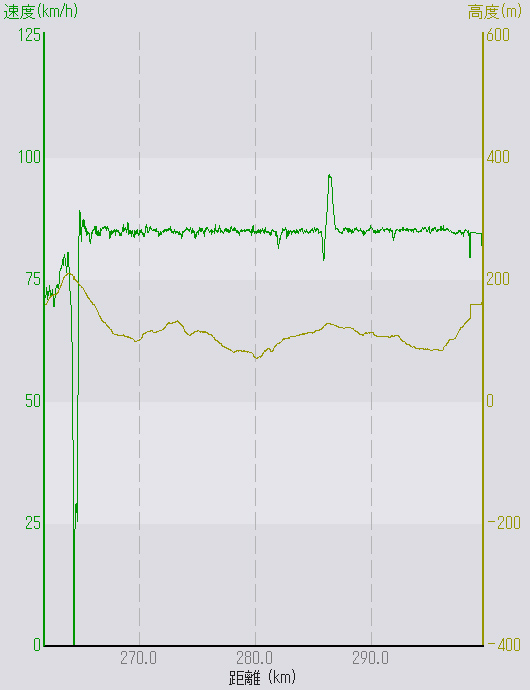
クルコンの速度設定は85kmhに設定しており、GPSログを見返すと84kmh付近を一定に保っていることが判明。設定と実速度の誤差は1kmhに収まっており、さらには速度幅の振れが殆ど無い。正直なところ、ここまで精度よく制御しているとは思っていなかった。
では、人間クルコンと称して、アクセルペダルで速度を維持して走り続けているEK9シビックRではどうなっていたか。計測区間は、先のクルコン使用車とほぼ同じ。

こうなる。高速道路を走る際は、スピードメーターの針は90kmhを目標にして制御しているが、やはり振れ幅は大きい。グラフのスケールがクルコン計測時と異なるので、参考程度にしかならないが、速度制御の観点では人間の足よりもクルコンによる電子制御の方が優れていることは明白。
過去には、機械式/ワイヤー式のスロットルでもクルコンを後付けできるキットが販売されていた。現在は販売元が閉店しており、当然製品情報も失われている(SERIOUS リニアクルーズLC210)。もし引き続き存在していたら、導入の検討を行っていたかもしれない。
機械式とはいえ、クルコンが付いたEK9シビックRなんてのも、より怪しさが増すだろう。